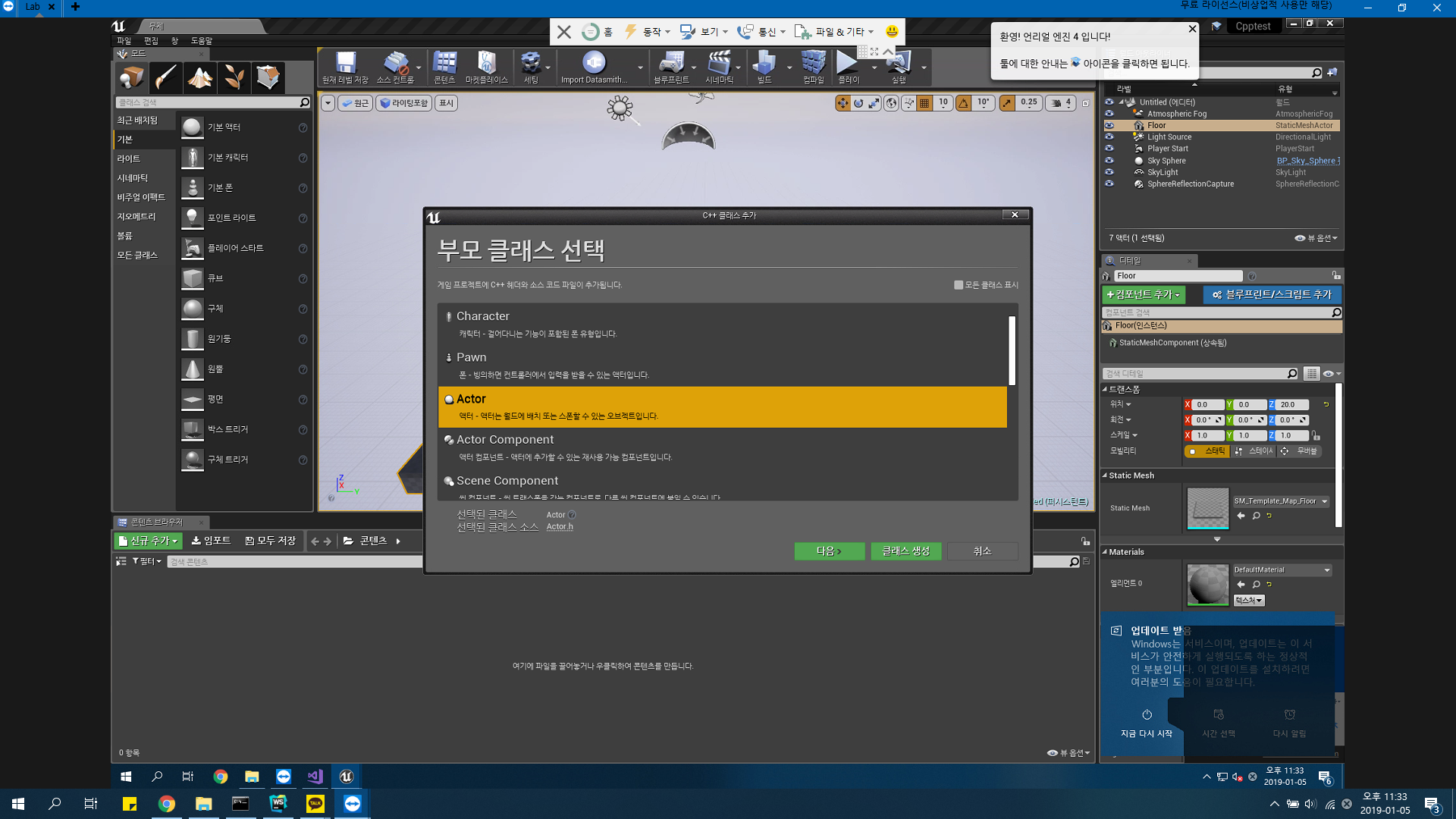
Unreal Engine and C++ (1) Posted on 2019-01-05 In Etc. 개요 Class 마법사(Unreal Engine에서 새로운 Class 만들기)File > New C++ Class > Read more »
Numerical Analysis (5) Posted on 2018-12-06 In Etc. Runge-Kutta Method for ODE Process Heun’s Method(a(2)=1/2) Ralston’s Method(a(2)=2/3) y(i+1)=y(i)+(a(1)k(1)+a(2)k(2))h k(1)=f(x(i), y(i)) k(2)=f(x(i)+p(1)h, y(i)+q(11)k(1)h) Read more »
Numerical Analysis (4) Posted on 2018-11-18 In Etc. Least squares regression for a straight line Process Residual의 합 Sr을 구하여 미분 각각의 Parameter에 대한 편미분 값이 0이 되도록 계산 구한 a(0)와 a(1)의 값으로 식 구하기 The standard error of the estimate - S(y/x) The correlation coefficient - r (5, 5)라는 Data point가 주어질때, 유효한가? Read more »
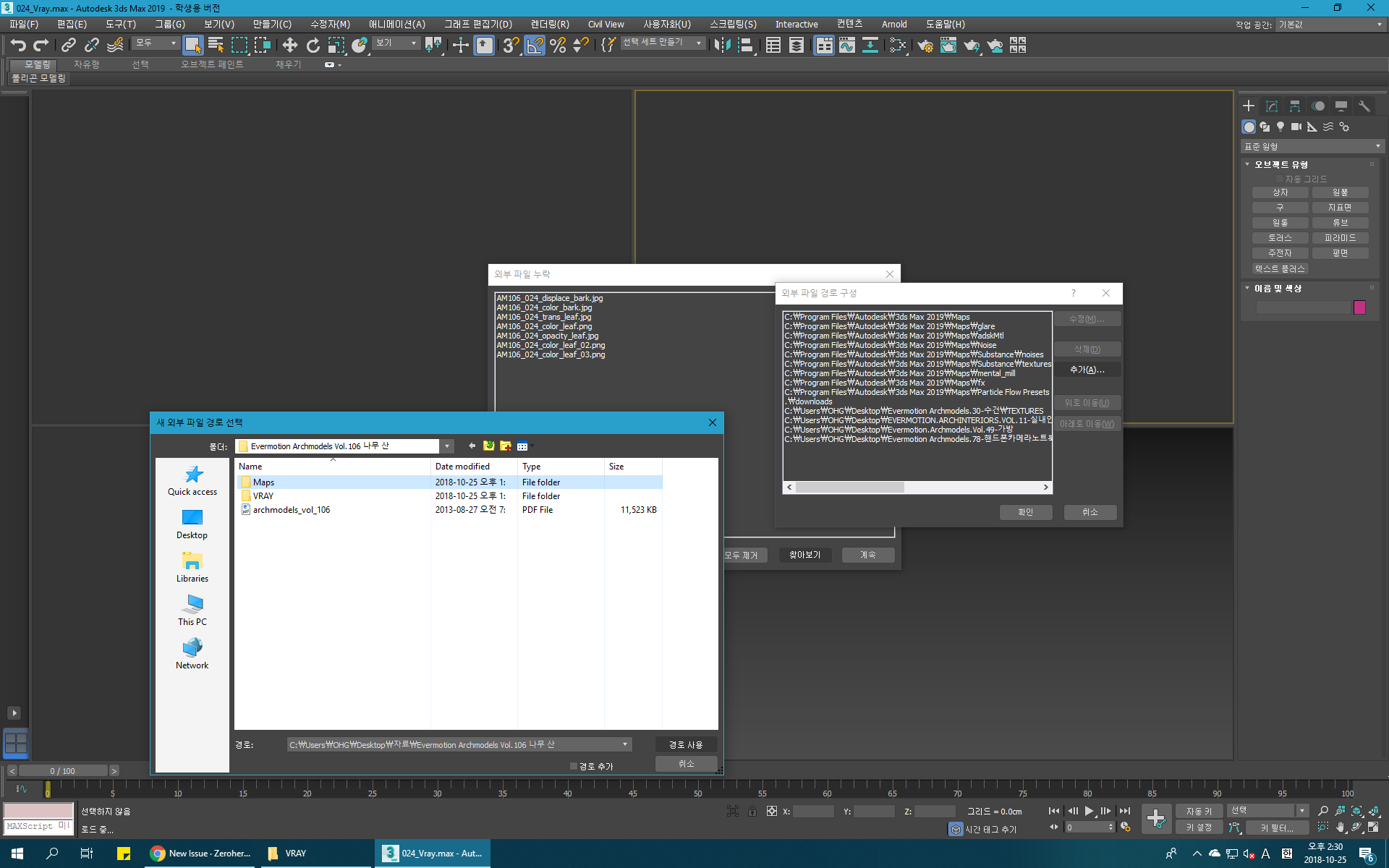
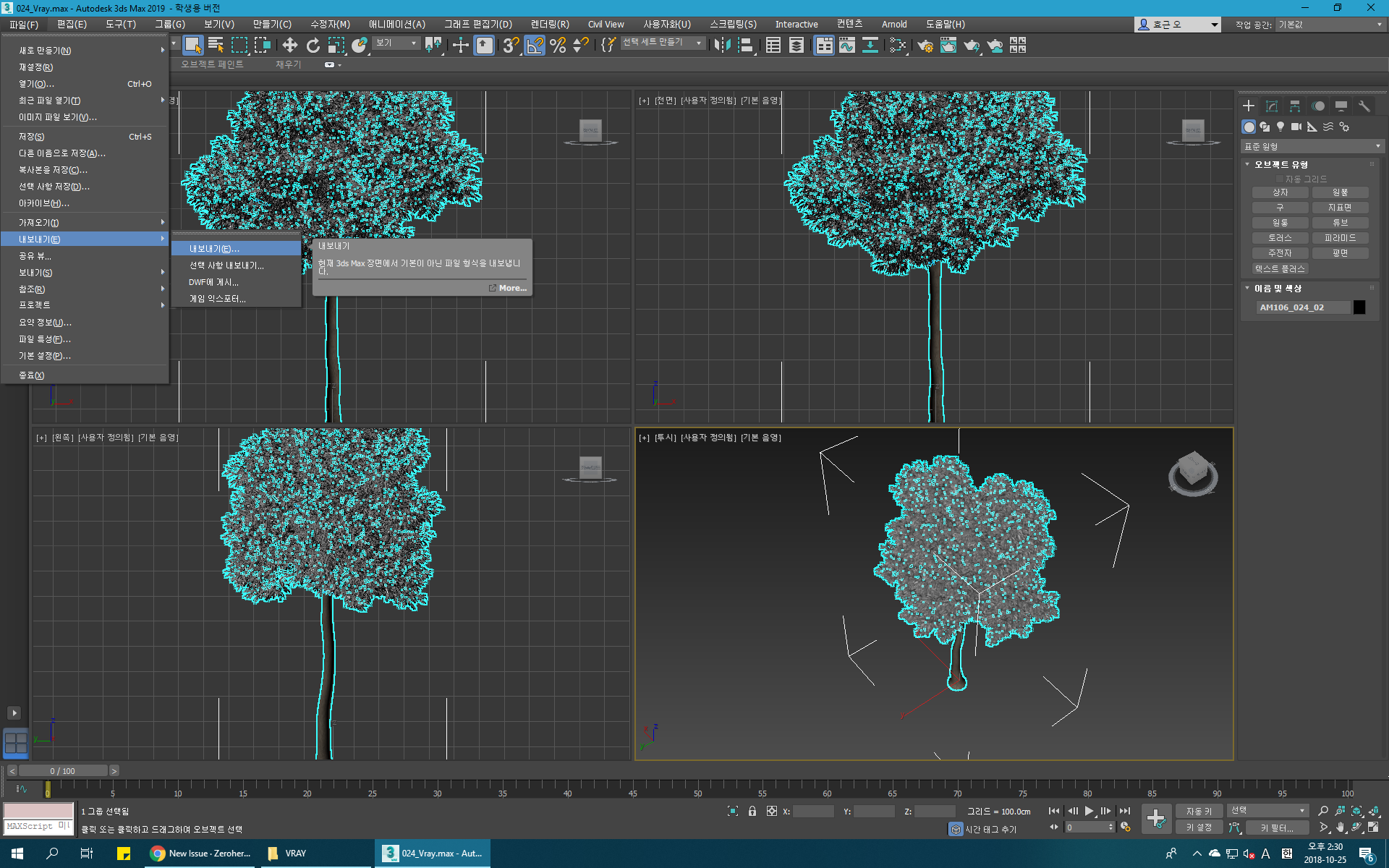
Exporting to Unreal Engine at 3ds Max by Datasmith Posted on 2018-10-25 In Etc. 3ds Max에서 directory지정 후 파일 열기 파일 - 내보내기 - 내보내기 Read more »
Numerical Analysis (3) Posted on 2018-10-13 In Etc. Newton-Raphson method12def newrap(x): return x - f(x) / f1(x) Read more »