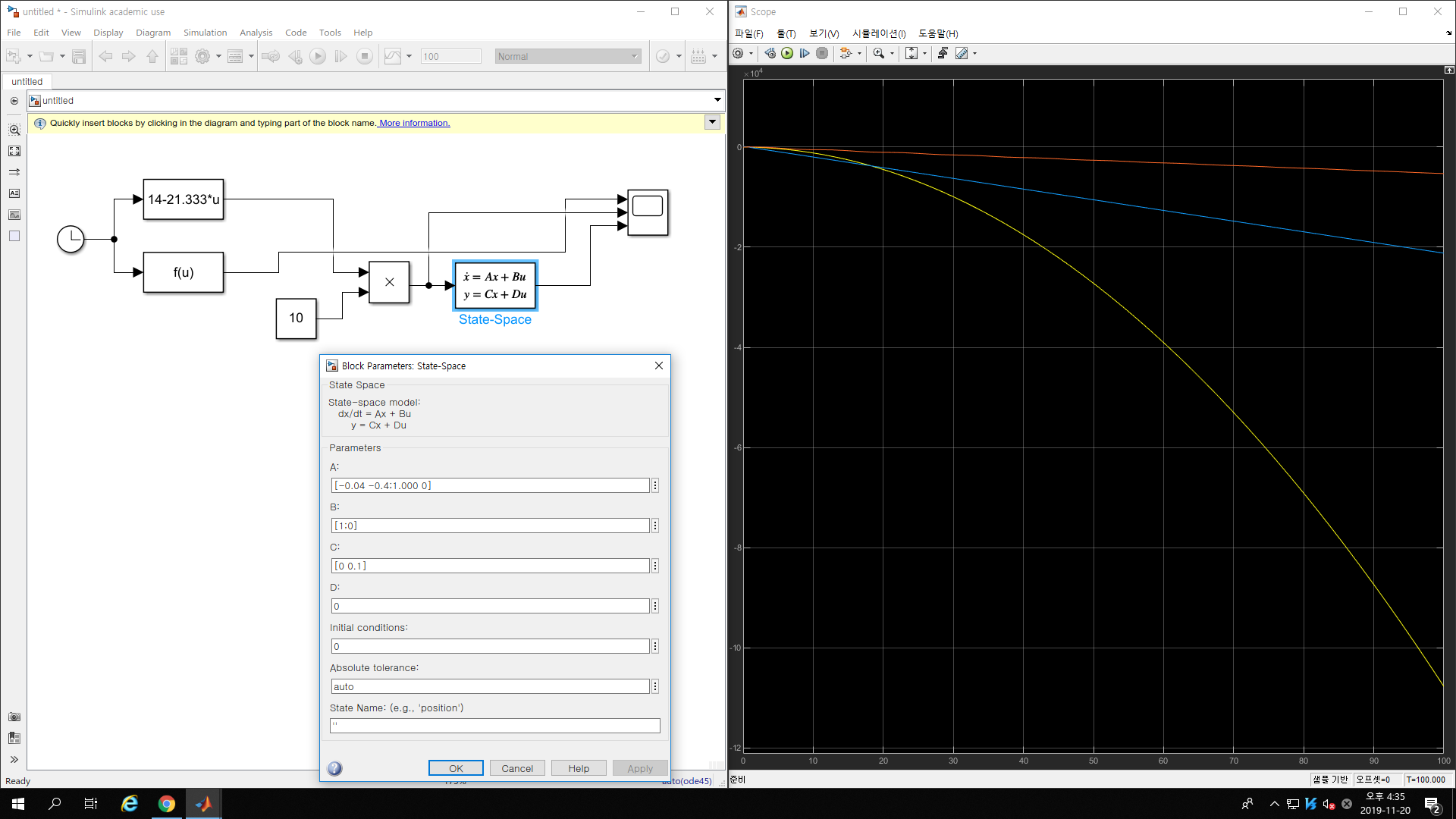
MATLAB (7) Posted on 2019-11-24 In Etc. TF&state-space123456789101112syms Y s y(t) t laplace(10*diff(diff(y(t)))+0.4*diff(y(t))+4*y(t))Y1=s*Y;Y2=s*Y1;sol=solve(10*Y2+0.4*Y1+4*Y-1,Y);pretty(sol) num=[1];den=[10 0.4 4];h=tf(num, den);[A,B,C,D]=tf2ss(num, den) 실행결과 123456789101112131415161718192021222324252627282930313233>> Untitled ans = (2*s*laplace(y(t), t, s))/5 - (2*y(0))/5 - 10*s*y(0) + 10*s^2*laplace(y(t), t, s) - 10*subs(diff(y(t), t), t, 0) + 4*laplace(y(t), t, s) 1--------------- 2 2 s10 s + --- + 4 5 A = -0.0400 -0.4000 1.0000 0 B = 1 0 C = 0 0.1000 D = 0 rand, polyfit12345678xran=rand(11,1);plot(xran)xlabel('Time[s]')ylabel('Mag.[mm]')x=0:10;p=polyfit(x',xran,3);v=diff(p)a=diff(v) 실행결과 12345678v = -0.1215 0.6093 -0.5209 a = 0.7309 -1.1302 Constant12345678x=[1:1:4];y=[2 3 2 1];plot(y)xlabel('Time[s]')ylabel('Mag.[mm]')p=polyfit(x,y,3);v=diff(p)a=diff(v) 실행결과 12345678v = -3.3333 10.6667 -10.6667 a = 14.0000 -21.3333 Simulink